
华为发明行人轨迹预测系统,提高自动驾驶安全性

随着经济的发展和人民生活水平的提高,汽车保有量逐年增长,这也导致了交通拥堵和交通事故的发生。为提高车辆驾驶的安全性,目前已有一些车辆制造厂商,将自动驾驶技术应用于车辆中,以实现车辆的自动驾驶。
而车辆在自动驾驶过程中,有一项非常重要的功能,就是对附近的行人的轨迹进行预测。现在常用的行人轨迹预测方法有根据行人的历史轨迹信息进行行人的轨迹预测,然而行人的行走行为存在很多主观因素,因此这种基于行人的历史轨迹信息来预测行人未来的预测轨迹的方法的预测效果较差。
为此,华为在2019年12月30日申请了一项名为“一种轨迹预测方法及相关设备”的发明专利(申请号:201980064064.9),申请人为华为技术有限公司。
在该专利中,发明了一种行人轨迹的预测方法,根据目前公开的相关资料,让我们一起来看看这项轨迹预测方法吧。
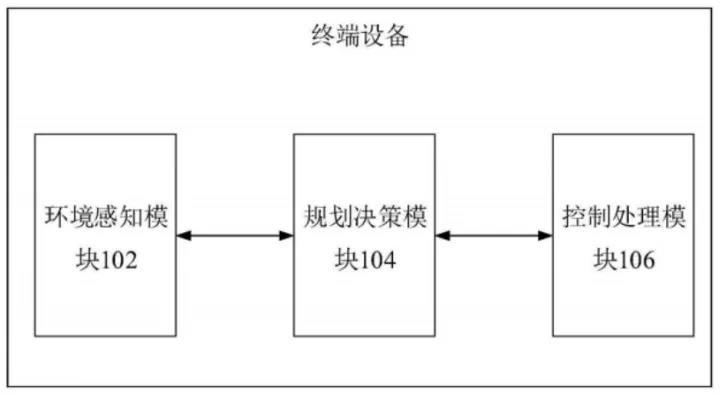
如上图,为该专利中发明的轨迹预测设备的硬件结构示意图,该设备主要包括环境感知模块102、规划决策模块104以及控制处理模块106。环境感知模块主要通过外围系统(如传感器、摄像头等)采集障碍物信息、轨迹预测设备所处的周围环境信息以及设备所在车辆的行驶信息。
规划决策模块包括行为预测模块和规划模块:行为预测模块主要用于根据环境感知模块所采集的信息,预测障碍物的行为意图以及该行为意图对应的运动轨迹(即障碍物轨迹);规划模块用于在保证安全的前提下,根据行为意图获得对应的控制策略,以便后续利用该控制策略控制车辆进行安全行驶。
控制处理模块用于根据规划决策模块获得的控制策略,对车辆进行相应地控制和调整,以避免车辆与障碍物发生碰撞,例如对车辆的方向盘转角、行驶速度、是否制动刹车、是否按压加速踏板等车辆参数进行控制。
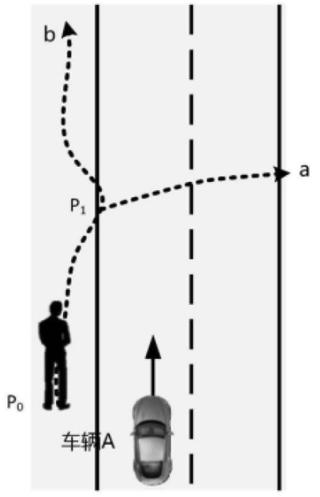
如上图,为该专利中展示的一种可能的场景示意图,在车辆往来的道路上,行人位于道路边缘的P1点位置,为防止车辆与行人发生碰撞,此时车辆需预测行人的运动轨迹,并基于预测的运动轨迹来控制自身的安全行驶,以避免与行人发生碰撞。
例如,若预测行人P1点后的运动轨迹是运动轨迹b(横穿道路),则需要控制车辆减速行驶、甚至刹车等待等,以避让行人。又例如,假设预测行人P1点后的运动轨迹是运动轨迹a沿道路直行或在P1点停止,则不需要对车辆进行任何控制操作,因为这种情况下不会发生车辆和行人的碰撞等危险情况。
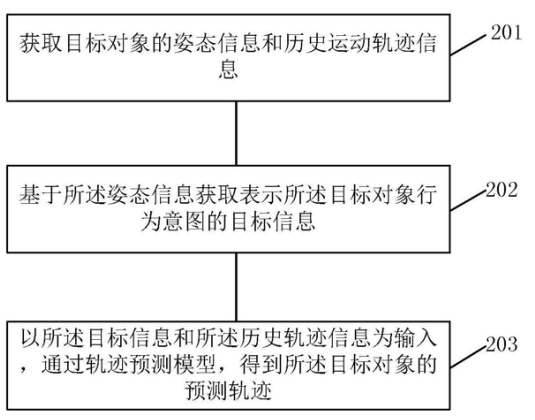
如上图,为该专利中发明的轨迹预测方法的流程图,首先,系统获取目标对象的姿态信息和历史运动轨迹信息,具体来说,设备会将用户的姿态信息输入例如循环神经网络等算法,得到表示目标对象行为意图的目标信息。
接着,基于姿态信息获取表示目标对象行为意图的目标信息,该专利中罗列了一些行人的意图变化,例如:由移动状态变为静止状态、保持移动状态、由静止状态转换为移动状态等。最后,以目标信息和历史轨迹信息为输入,通过轨迹预测模型,得到目标对象的预测轨迹。
以上就是华为发明的行人轨迹预测系统,该方案通过轨迹预测模型,将行人的行为意图作为行人轨迹预测的输入特征,从而减小了行人轨迹的预测误差。该方案能够解决现有技术中行人运动轨迹预测不准确的问题,有效提高了车辆控制的安全性。
责任编辑:潘一大
小手一抖把码扫,物联消息全知晓


一周新闻榜
- 1. 关于发布《高点全景视频监控联网技术要求》团体标...
-
2.
智造大会2024 | 共建新生态,引领新智造
2024-04-12
-
3.
《8K监视器通用规范》等8项行业标准报批公示
2024-04-15
-
4.
安防视频监控标准强化!市场主流技术进展如何?
2024-04-12
-
5.
2024海康威视渠道合作伙伴大会在杭州圆满举行
2024-04-16
-
6.
家庭安全的未来:新兴技术和趋势
2024-04-12
-
7.
市监局发布2023年电子门锁等11种安全技术防范产品...
2024-04-15
-
8.
精彩回顾!『2024海康威视渠道合作伙伴大会』金句...
2024-04-16
-
9.
两座超大城市对“视”联手 杭深奏响智能物联产业合...
2024-04-12
-
10.
欧洲网络机构分享十大威胁:技能短缺现象日益严重
2024-04-17





